


TECHNICAL KNOWLEDGEBASE
【VirtualLab Fusion】
2023-03-29
パラメトリック最適化
本チュートリアルは、球面レンズの本当の焦点を発見する例を取り、VirtualLab™のパラメトリック最適化の活用法を説明するものです
| 著者: | Tino Untermann, LightTrans GmbH |
| キーワード: | parametric optimization、introduction、laser system、lens system、focus、constraint、Starter Toolbox、VirtualLab™ Advanced |
| 必須ツールボックス: | Starter Toolbox Advanced |
パラメトリック最適化 - はじめに
- 光学系は、様々なアプリケーション(特にレーザーシステム)に対して最適化する事が可能です
- 最適化は VirtualLab™ の”Parametric Optimization Document”を用いて可能です
- 本書では、最適化ドキュメントの設定方法を解説します
- 例として、一つをフリーパラメーターとして、次の課題に取り組みます:
球面レンズのバックフォーカスの発見
これを行うために、ビーム径は最少となるようにします - 注記:パラメトリック最適化は、VirtualLab™ Advanced(64bit版)のみを対称としております
サンプル Light Path Diagram
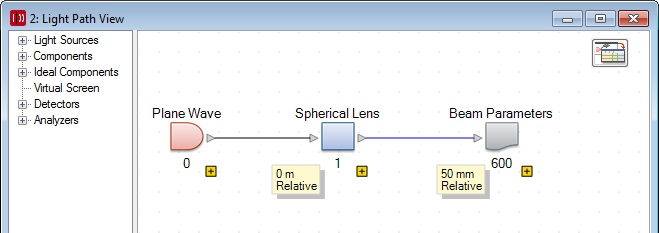
- サンプルファイルに用意した Light Path Diagram “Spherical_Lens_System.lpd”を開きます
- ここでは平面波が球面レンズを通して伝播します
- レンズ後のある距離におけるビーム径を測定します。 初期の距離は、50 mmです。
パラメトリック最適化ドキュメント
ツールバーのアイコンをクリックし、VirtualLab™ 内に新たにパラメトリック最適化ドキュメントを開きます
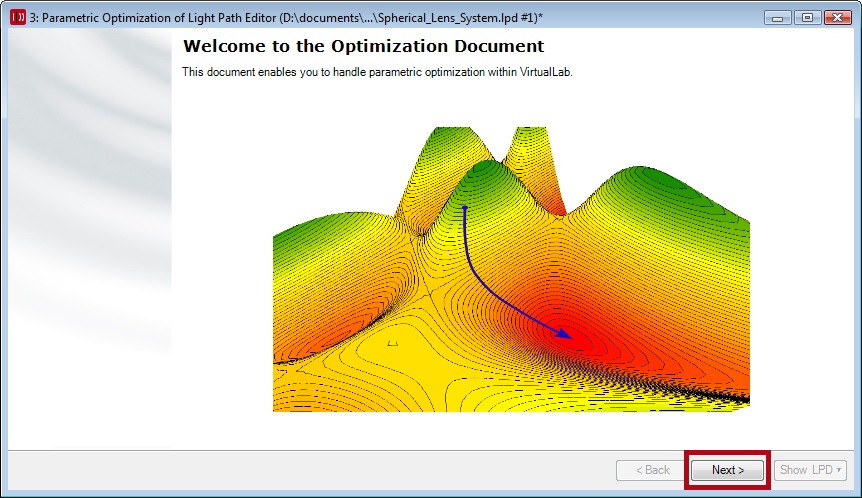
Nextをクリックします
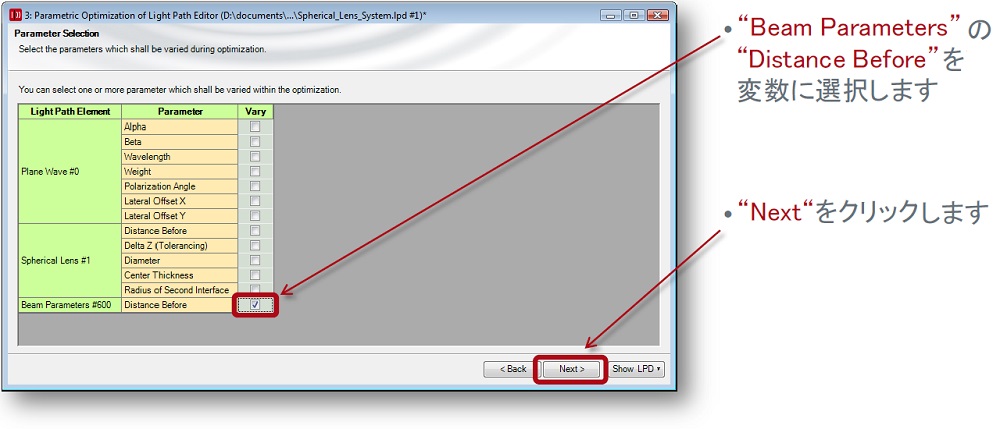
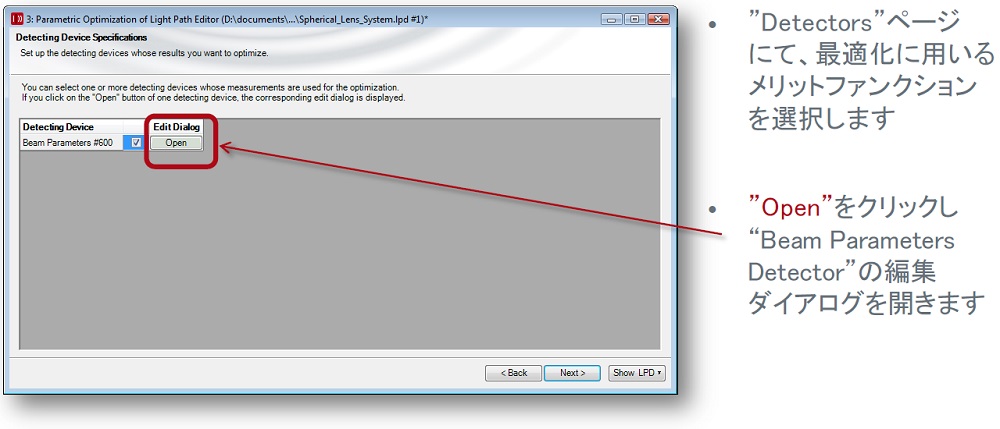
変数パラメーターの選択
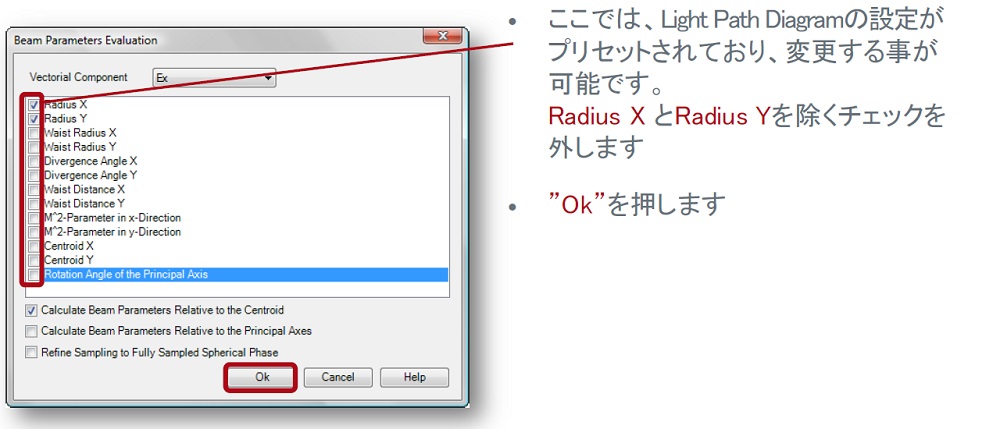
メリットファンクションの選択
 Nextをクリックします
Nextをクリックします
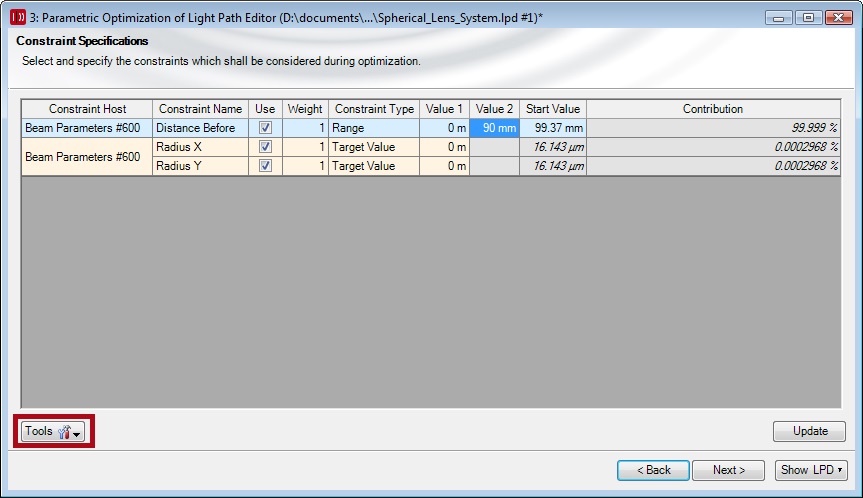
制限の設定
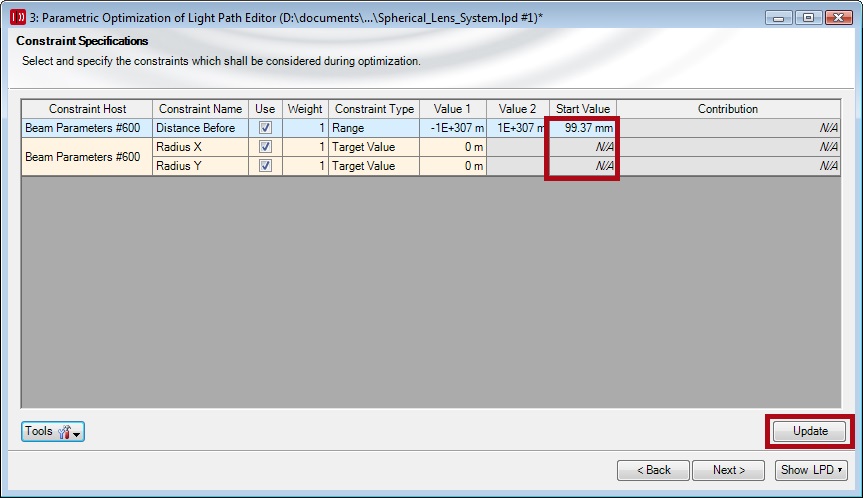
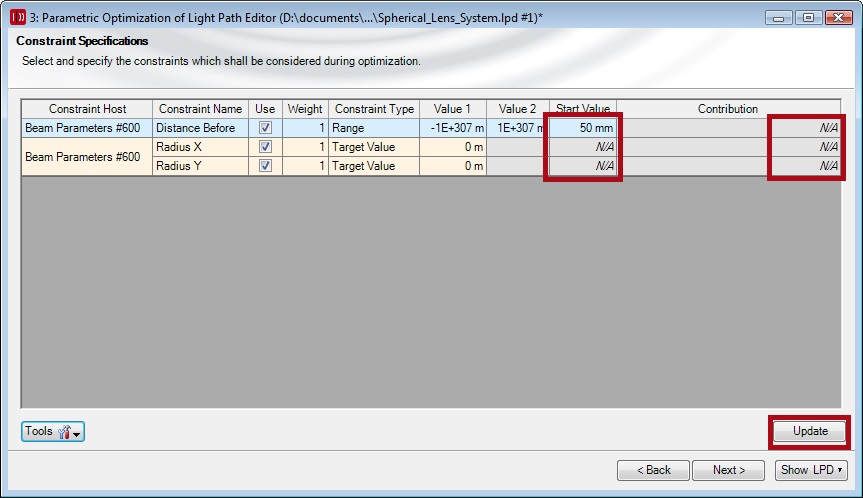
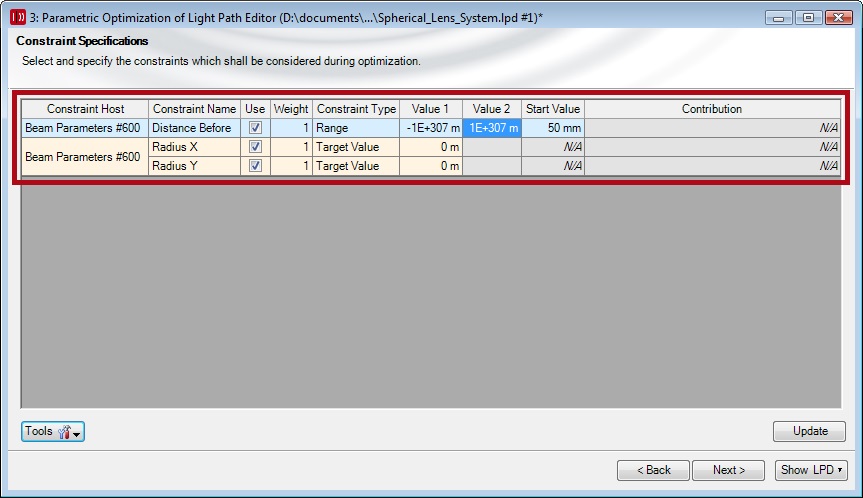
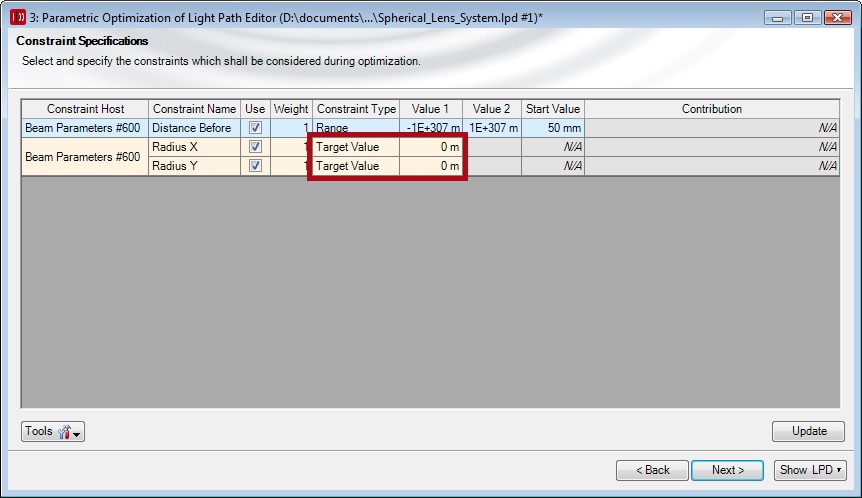 ”constraint specifications”にて、最少化するターゲット機能を定義します。
”constraint specifications”にて、最少化するターゲット機能を定義します。
ディフォルト設定を保持し – ターゲット値を Radius X と Radius Yとも“0 m”とします。
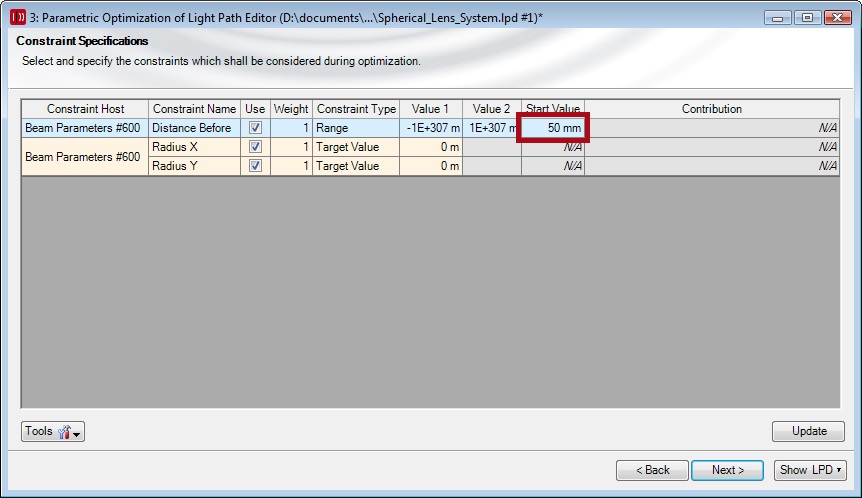 ”Start Value”(初期値)又はフリーパラメーターは、ここでは”Distance Before”とします。プリセットされた値は、Light Path Diagramからコピーする事が可能です。ここでは50mmとなります。
”Start Value”(初期値)又はフリーパラメーターは、ここでは”Distance Before”とします。プリセットされた値は、Light Path Diagramからコピーする事が可能です。ここでは50mmとなります。
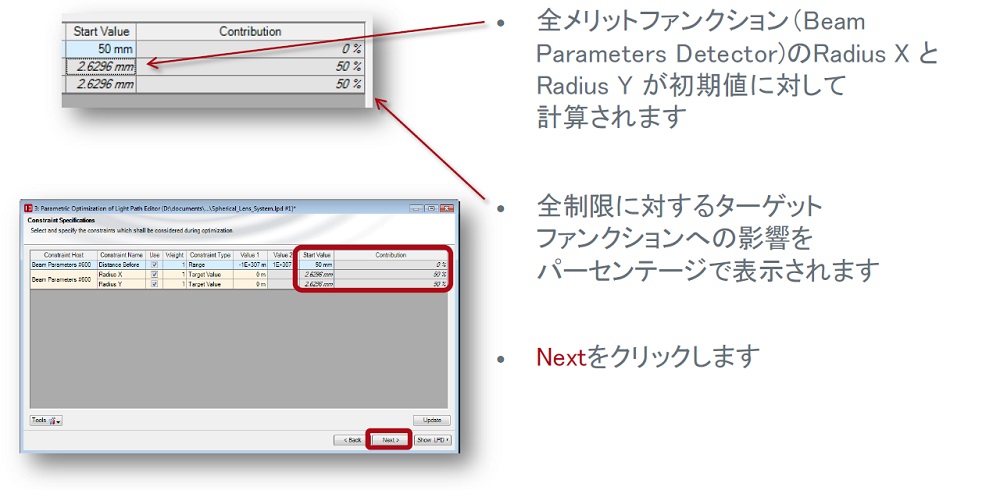 ”Update”ボタンをクリックし、メリットファンクションに対する計算を開始します。これにより、必要に応じてLight Path Diagramのシミュレーション工程が開始されます。
”Update”ボタンをクリックし、メリットファンクションに対する計算を開始します。これにより、必要に応じてLight Path Diagramのシミュレーション工程が開始されます。
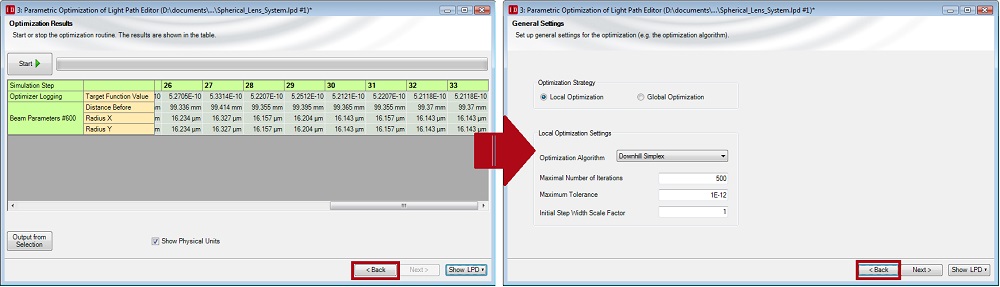
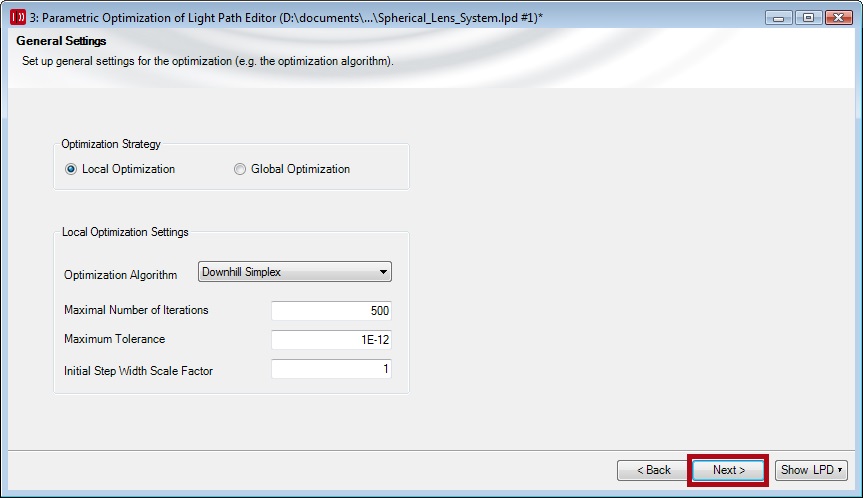
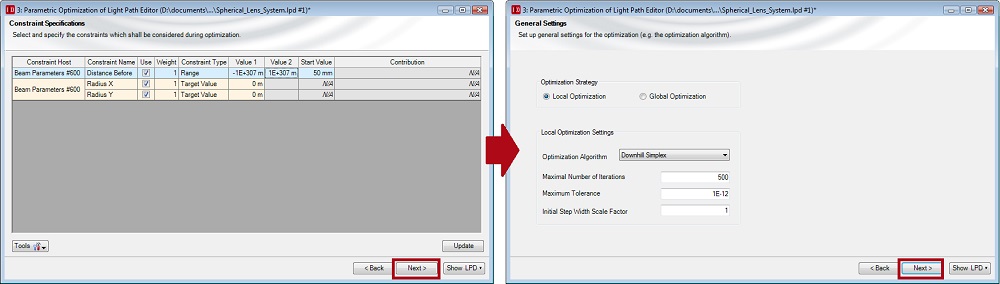
一般設定
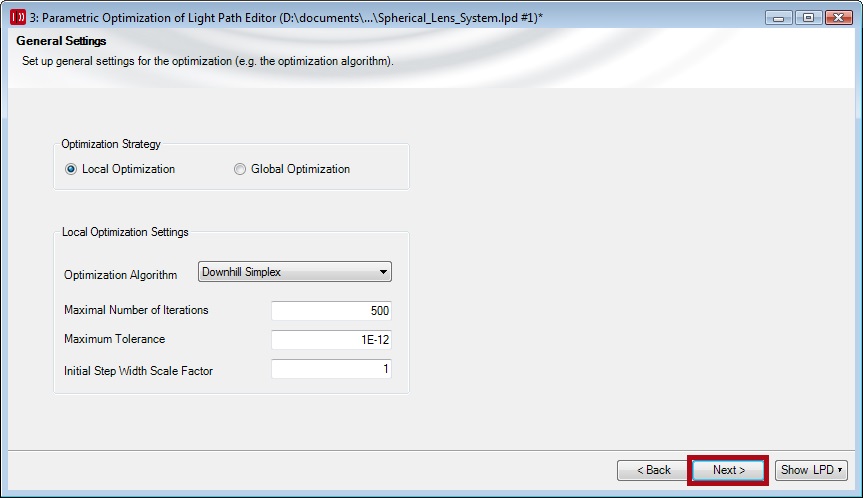
- グローバルまたはローカル最適化などのアルゴリズミックパラメーター、アルゴリズム、ストップ基準などの調整が可能です
- 標準の設定を保持します
- Nextをクリックします
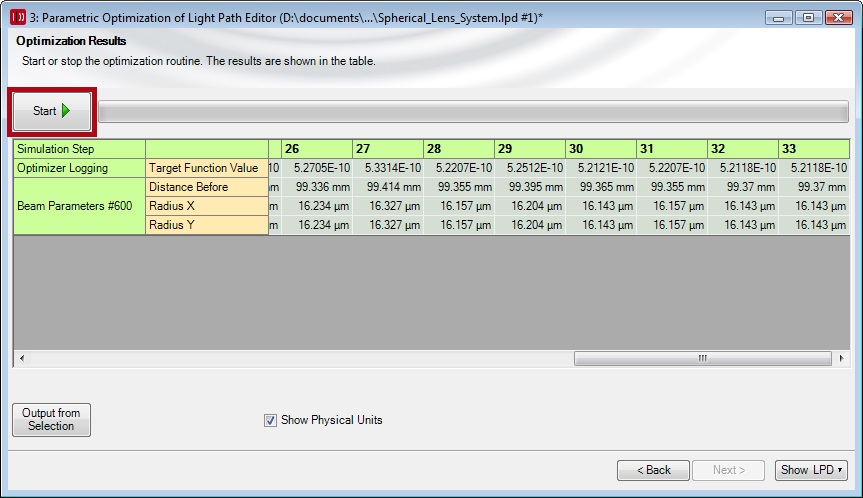
最適化の開始
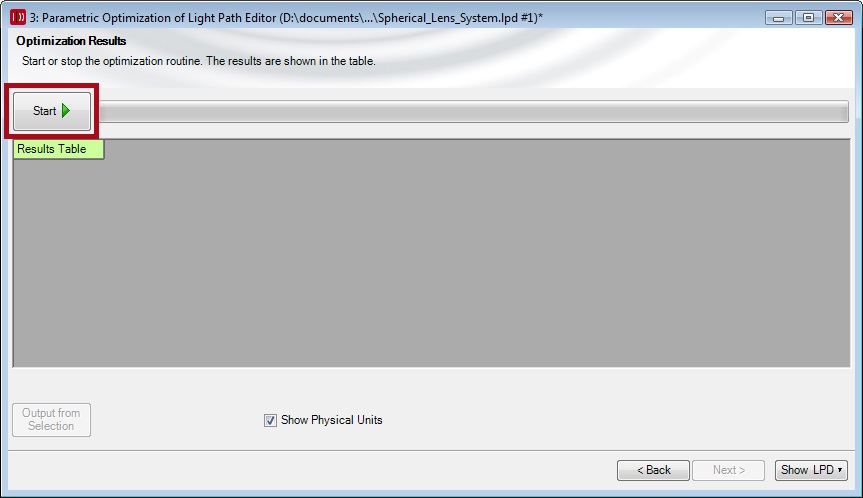
- このページでは最適化作業のスタートとストップ、シミュレーション工程のロギングなどが可能です
- Startを押し最適化工程が終了するのを待ちます
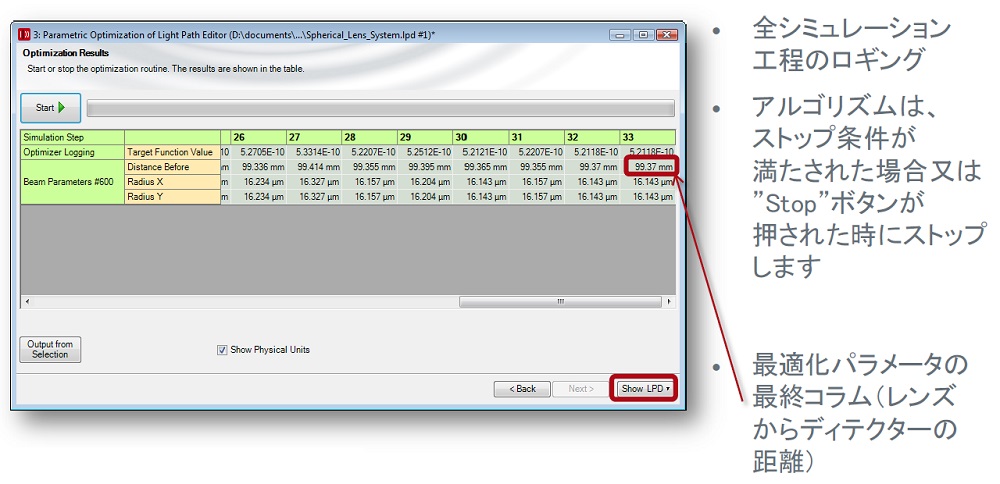
Show LPDをクリックします
最適化されたLPDの表示
メニューから Show Optimized LPDを選択し、最適化パラメーターを含むLight Path Diagram を開きます
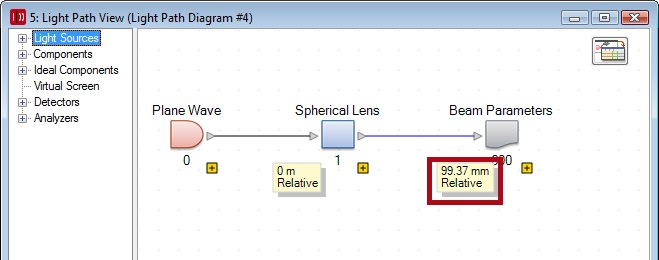
最適化されたパラメーターを含むLight Path Diagram
最適化ツールによる変更初期値
ドキュメントのConstraint Settings(制限設定)ページに戻り”Optimization Results”ページで Backをクリックし、”General Settings”ページでもBackをクリックします
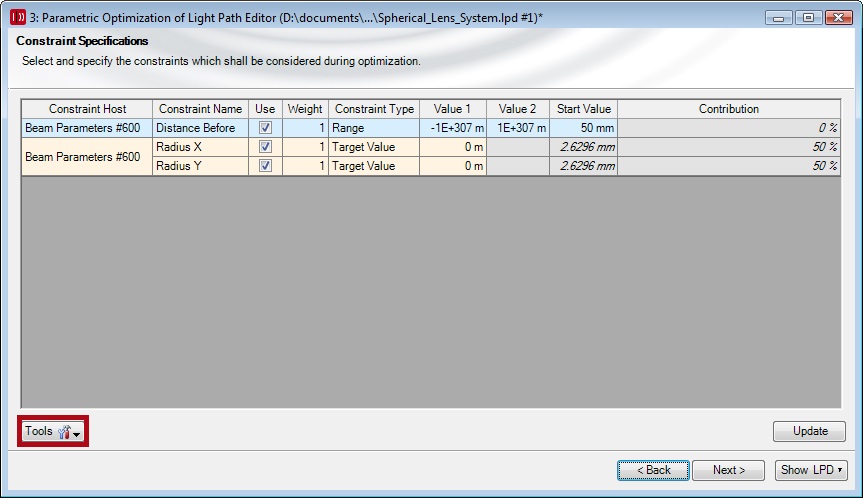 Toolsボタンを押します
Toolsボタンを押します
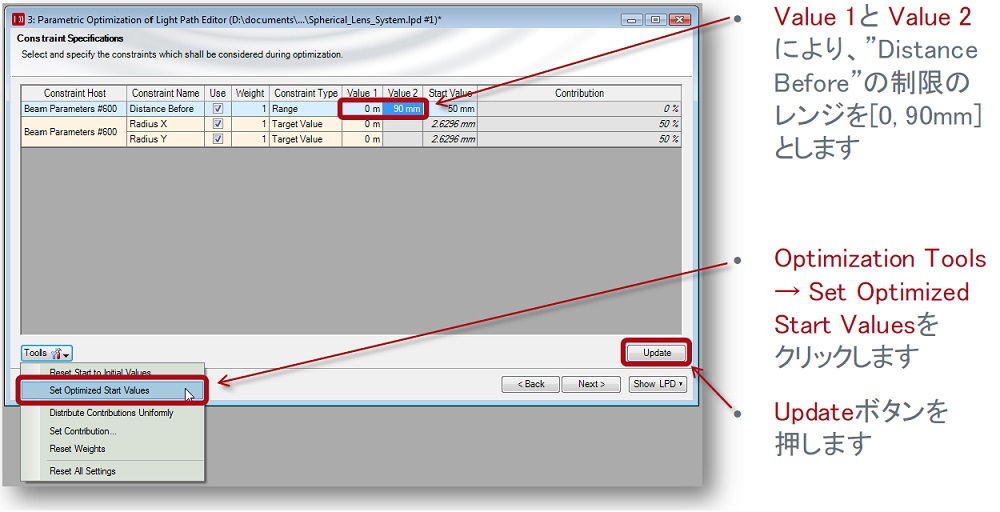
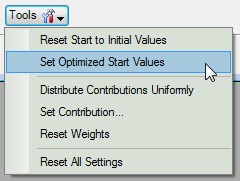 Set Optimized Start Values をクリックし最適化された”Distance Before”を新たな初期パラメーターとします
Set Optimized Start Values をクリックし最適化された”Distance Before”を新たな初期パラメーターとします
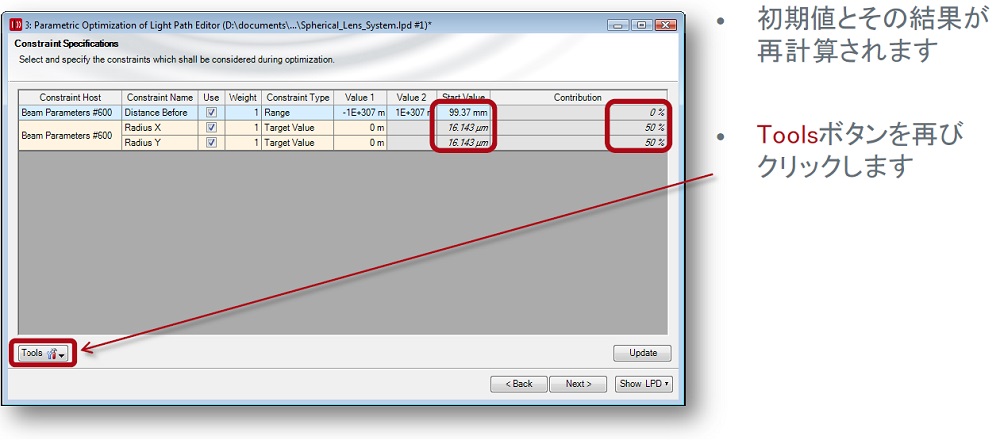
- 変数パラメーターの初期値(Distance Before)を、最適化された数値(99.37mm)に変更します。
メリットファンクション(Radius X、Radius Y)を更新します(N/A) - Updateをクリックします
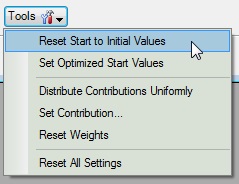
Reset Start to Initial ValuesをクリックしイニシャルのLPDから”Distance Before Beam Parameters Detector” をコピーし”constraint table”にペーストします
変数パラメーターの初期値(Distance Before)を初期値に(50mm)に変更します
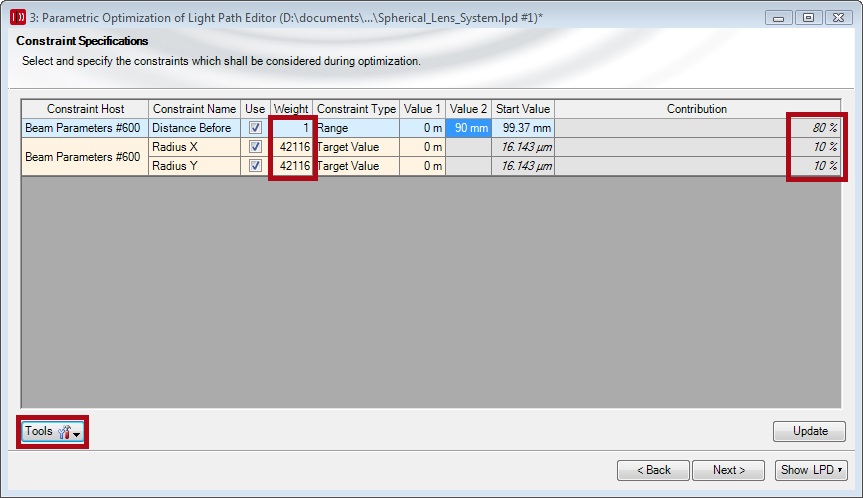
パラメーター制限の編集
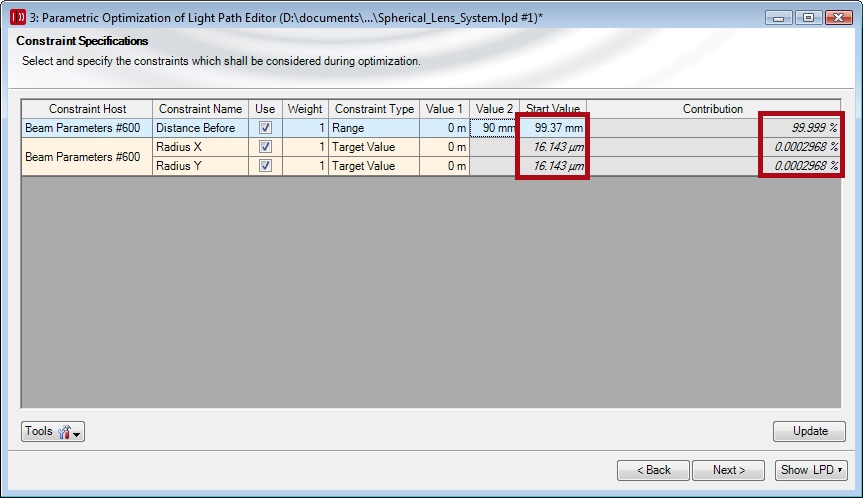
- パラメーター制限が初期値で既に破たんを来たしました
- ターゲットファンクションSI の派生単位(ここではm)の定義により、パラメーター制限が非常に高くなっております(99.999%)
制限ウエイトの変更
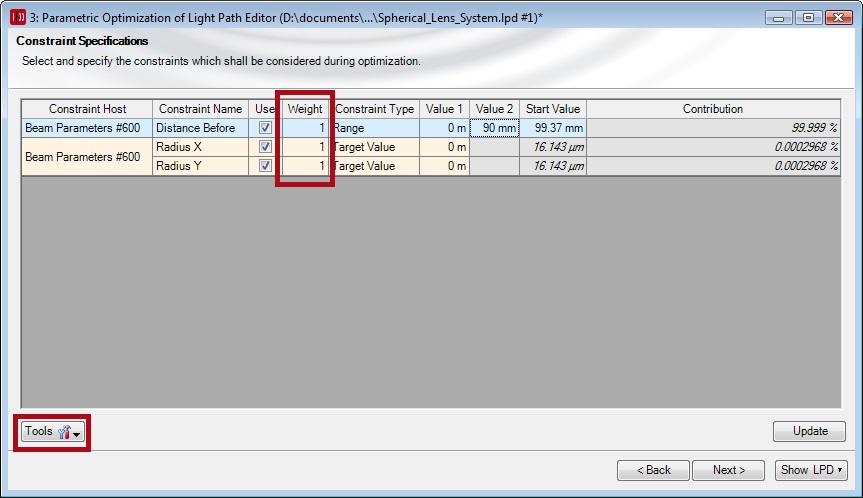
- 制限はウエイト付けにより変更する事が可能です
- ウエイトは、直接入力か、最適化ツールを介して入力可能です
- Toolsボタンを押します
Equal Contributionsの設定
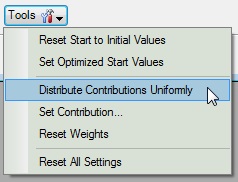 Distribute Contributions Uniformlyをクリックし、破たんを来した制限の”Equal Contribution”のウエイトを計算します
Distribute Contributions Uniformlyをクリックし、破たんを来した制限の”Equal Contribution”のウエイトを計算します
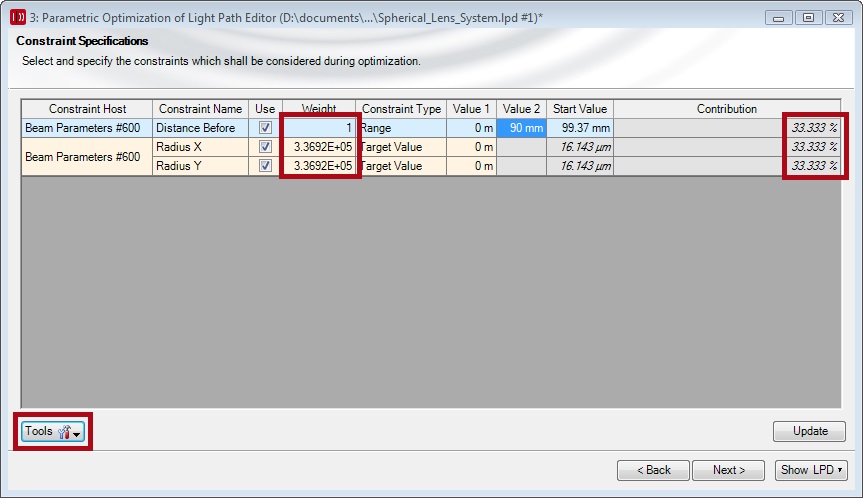
- 破たんを来した制限に対するContributionsは、統一化されました(namely 33.333%)
- Weightの数値が正しいウエイトにより達成されました
- Toolsボタンを 押します
Target Contributionの設定
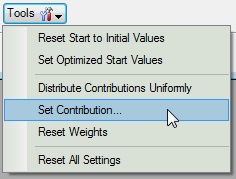 Set Contribution をクリックし任意のtarget contributionを破たんを来した制限(contribution >0)を0 から100% に設定します
Set Contribution をクリックし任意のtarget contributionを破たんを来した制限(contribution >0)を0 から100% に設定します
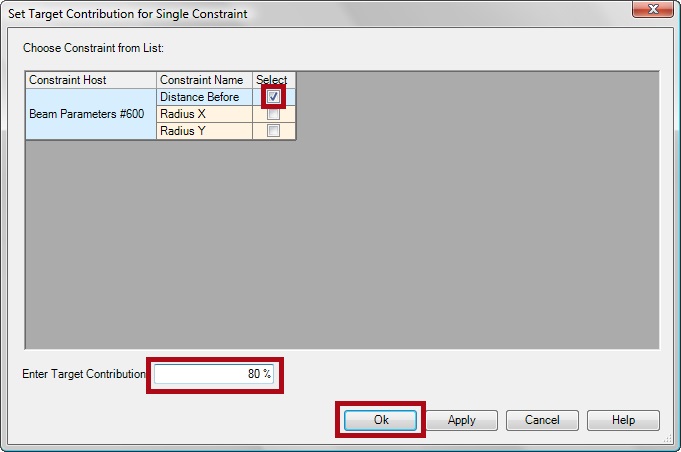
- パラメーター制限 (”Distance Before”を選択します)としてTarget Contributionに80 %と入力します
- Ok をクリックします
- パラメーター制限の”Contribution”が80% となりました
- 回折オーダーcontributionsの合算は20%となりました
- ウエイトは結果に従いました
- Optimization Toolsボタンを押します
ウエイトのリセット
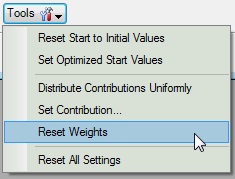
Reset Weightsをクリックし、全てのウエイトを1とします
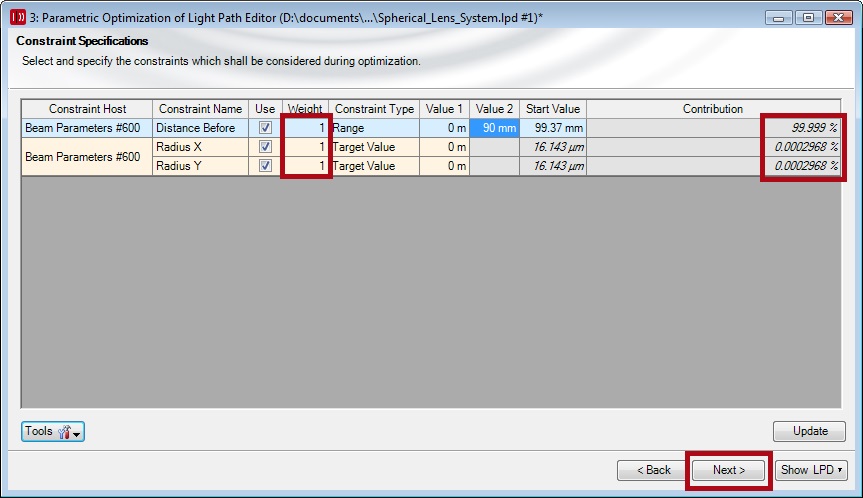
- ウエイトを1にリセットされてます
- 更新されパラメーター制限の”contribution”は非常に高くなりました(99.999%)
- Nextを押します
最適化の開始 #2
 Nextを押します
Nextを押します
Startを押して新たな最適化を開始し、計算が終了するのを待ちます
最適化 #2の結果
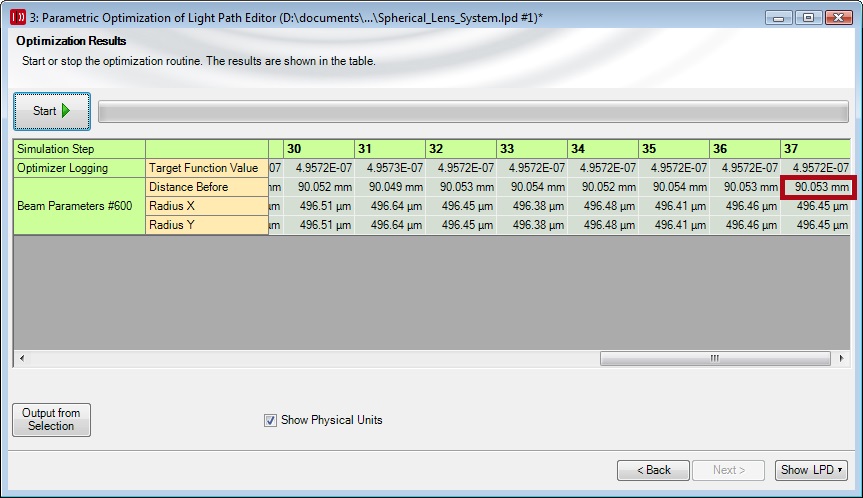
”Distance Before”の最適化の結果は、アッパーリミットである90mmに近づきました。
これは制限に対する、高い”contribution”によるものです。
オプション:全設定のリセット
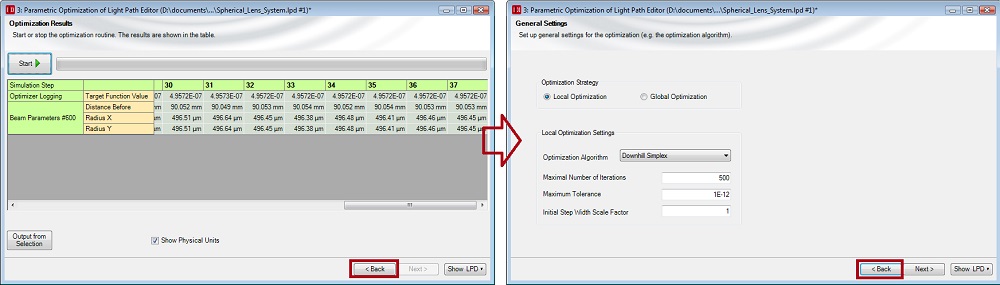
- 全設定をイニシャル値にリセットする事が可能です
- ”Constraint Settings”ページにて(最適化結果ページにてBackを押し”General Settings”にてBackを押します)
全Constraint Settings のリセット
 Toolsボタンを押します
Toolsボタンを押します
Reset All Settings をクリックし”constraint settings”と初期値をリセットします Yes を押します
Yes を押します
全”constraint settings”と初期値は、リセットされイニシャル値になりました
最適化の開始 #3
 “Optimization Results”ページに行き ”Constraint Specification”ページにてNextを押し、”General Settings”ページにてNextを押します
“Optimization Results”ページに行き ”Constraint Specification”ページにてNextを押し、”General Settings”ページにてNextを押します
 Startを押し、最適化計算が終了するのを待ちます
Startを押し、最適化計算が終了するのを待ちます
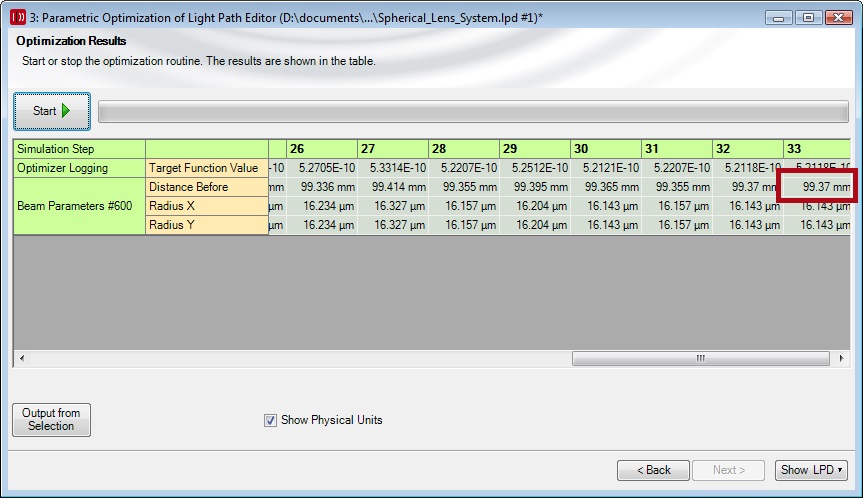 最適化結果がレンズの焦点面に再び戻りました(99.37mm)
最適化結果がレンズの焦点面に再び戻りました(99.37mm)